





Tous les produits
-
Commande variable de fréquence de VFD
-
onduleurs à fréquence variable
-
Inverseur de PMSM
-
L'inverseur a entré 220v la sortie 380v
-
Inverseur solaire de pompe monophasé
-
contrôleur solaire de pompe à eau
-
Inverseur solaire de pompe de MPPT VFD
-
Démarreur mou de moteur
-
Réacteur d'inverseur
-
Résistance de freinage de VFD
-
Filtre de VFD
-
Inverseur solaire de pompe de 3 phases
-
 Tayfun de Turquiel'inverseur solaire de pompe est vraiment de qualité très bonne et nous avons également préparé quelques produits promotionnels pour l'exposition. Nous allons faire de nouveaux ordres bientôt. L'année dernière il y avait seulement un agent local et cette année, il y a plus de 8. Certains d'entre eux seulement vendre Veikong !
Tayfun de Turquiel'inverseur solaire de pompe est vraiment de qualité très bonne et nous avons également préparé quelques produits promotionnels pour l'exposition. Nous allons faire de nouveaux ordres bientôt. L'année dernière il y avait seulement un agent local et cette année, il y a plus de 8. Certains d'entre eux seulement vendre Veikong ! -
 Cristian du ChiliC'est très bon ! Les options d'affichage à cristaux liquides le facilitent beaucoup pour employer. C'est le point fort, facile de l'utilisation. Et robuste. Grand logiciel de PC.
Cristian du ChiliC'est très bon ! Les options d'affichage à cristaux liquides le facilitent beaucoup pour employer. C'est le point fort, facile de l'utilisation. Et robuste. Grand logiciel de PC. -
 Brahim assad de SyrieLa fréquence de la sortie VFD500 est stable quand les autres flottent. Également le courant de sortie est inférieur d'autres, celui sont pourquoi la fréquence de sortie est plus haute trop qui peut économiser plus d'énergie.
Brahim assad de SyrieLa fréquence de la sortie VFD500 est stable quand les autres flottent. Également le courant de sortie est inférieur d'autres, celui sont pourquoi la fréquence de sortie est plus haute trop qui peut économiser plus d'énergie.
Personne à contacter :
Terry
Numéro de téléphone :
008613910001000
WhatsApp :
+8613923735888
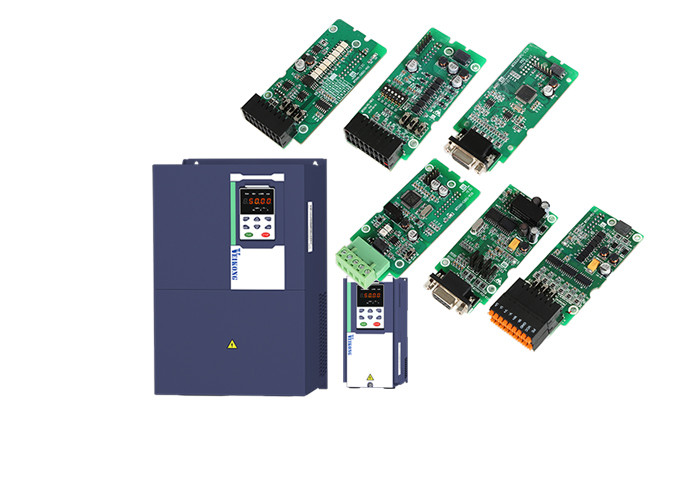
Lecteur variable triphasé 30kw 40hp de fréquence monophasé VFD








| Lieu d'origine | LA CHINE |
|---|---|
| Nom de marque | VEIKONG |
| Certification | CE, ROHS |
| Numéro de modèle | VFD500-030G/037GT4B |
| Quantité de commande min | 1 |
| Prix | Please contact quotation |
| Détails d'emballage | l'inverseur de <45kw soit le paquet utilisé de carton, ≥45kw soit paquet en bois utilisé de cas |
| Délai de livraison | dépend des quantités |
| Conditions de paiement | T/T, Western Union, L/C |
| Capacité d'approvisionnement | 1000 UNITÉS PAR SEMAINE |
Détails sur le produit
| Tension | 380V/220V | Puissance | 30Kw/40hp |
|---|---|---|---|
| Mode de contrôle | Contrôle de V/F, contrôle de vecteur | Niveau de protection | IP20/IP65 |
| Communciaton | Modbus485 Canopen Profinet | Clavier | Clavier numérique de LED, clavier numérique d'affichage à cristaux liquides, double clavier numériqu |
| Mettre en évidence | Lecteur variable 30kw de fréquence de VFD,Lecteur variable 3 40hp de fréquence de VFD,Vfd monophasé 40hp |
||
Description de produit
monophasé triphasé variable du lecteur VFD de fréquence de 30kw 40hp 220v 380v
Données techniques de VEIKONG VFD500 :
| Article | Specifiation | |
| Entrée | Tension d'Inuput |
1phase/3phase 220V : 200V~240V 3 phase 380V-480V : 380V~480V |
| Gamme de fluctuation permise de tension | -15%~10% | |
| Fréquence d'entrée | 50Hz/60Hz, fluctuation moins de 5% | |
| Sortie | Tension de sortie | 3phase : tension 0~input |
| Capacité de surcharge |
Application d'usage universel : 60S pour 150% du courant évalué Application légère de charge : 60S pour 120% du courant évalué |
|
| Contrôle | Mode de contrôle |
Contrôle de V/f Contrôle de vecteur de flux de Sensorless sans carte de PAGE (SVC) Contrôle de vecteur de flux de vitesse de capteur avec la carte de PAGE (VC) |
| Mode opérationnel | Contrôle de vitesse, contrôle de couple (SVC et VC) | |
| Gamme de vitesse |
1:100 (V/f) 1:200 (SVC) 1:1000 (VC) |
|
| Exactitude de contrôle de vitesse |
±0.5% (V/f) ±0.2% (SVC) ±0.02% (VC) |
|
| Réponse de vitesse |
5Hz (V/f) 20Hz (SVC) 50Hz (VC) |
|
| plage de fréquence |
0.00~600.00Hz (V/f) 0.00~200.00Hz (SVC) 0.00~400.00Hz (VC) |
|
| Pouvoir séparateur d'en fréquence d'entrée |
Arrangement de Digital : 0,01 hertz Arrangement analogue : fréquence maximum x 0,1% |
|
| Couple de démarrage |
150%/0.5Hz (V/f) 180%/0.25Hz (SVC) 200%/0Hz (VC) |
|
| Exactitude de contrôle de couple |
SVC : à moins de 5Hz10%, au-dessus de 5Hz5% VC : 3,0% |
|
| Courbe de V/f |
V / type de courbe de f : ligne droite, multipoint, fonction puissance, V/séparation de f ; Appui de poussée de couple : Poussée automatique de couple (prémonter), poussée manuelle de couple |
|
| Fréquence donnant la rampe |
Appui linéaire et accélération et décélération de courbe de S ; 4 groupes de temps d'accélération et de décélération, plaçant la gamme 0.00s | 60000s |
|
| Contrôle de tension de barre omnibus courant continu |
Contrôle de stalle de surtension : limitez la production d'électricité du moteur en ajustant la fréquence de sortie pour éviter de sauter le défaut de tension ;
Contrôle de stalle de sousvoltage : commandez la puissance du moteur en ajustant la fréquence de sortie pour éviter l'échec de lacet
Contrôle de VdcMax : Limitez la quantité d'énergie produite par le moteur en ajustant la fréquence de sortie pour éviter le voyage de surtension ; Contrôle de VdcMin : Commandez la puissance du moteur en ajustant la fréquence de sortie, pour éviter le défaut de sousvoltage de saut |
|
| Fréquence porteuse | 1kHz~12kHz (varie selon le type) | |
| Méthode de démarrage |
Début direct (peut être le frein superposé de C.C) ; début de cheminement de vitesse |
|
| Méthode d'arrêt | Arrêt de décélération (peut être le C.C superposé freinant) ; libre pour s'arrêter | |
| Fonction de Maincontrol | Pulsez le contrôle, le contrôle d'abattement, l'opération de jusqu'à 16 vitesses, la manière d'éviter dangereuse de vitesse, l'opération de fréquence d'oscillation, l'accélération et la commutation de temps de décélération, séparation de VF, du freinage d'excitation, du contrôle du processus PID, dormir et réveiller la fonction, la logique simple intégrée de PLC, les terminaux virtuels d'entrée et sortie, l'unité de retard intégrée, l'unité intégrée de comparaison et l'unité de logique, sauvegarde et restauration de paramètre, disque parfait de défaut, la remise de défaut, deux groupes de moteur parametersfreeswitching, câblage de sortie d'échange de logiciel, terminaux HAUT/BAS | |
| Fonction | Clavier numérique | Clavier de LED Digital et clavier numérique d'affichage à cristaux liquides (option) |
| Communication |
Norme : Communication de MODBUS PEUT S'OUVRIR ET PROFINET (À L'ÉTUDE) |
|
| Carte de PAGE | Carte d'interface par accroissement d'encodeur (sortie différentielle et collecteur ouvert), carte de transformateur rotatoire | |
| Terminal d'entrée |
Norme : 5 terminaux d'entrée numérique, l'un d'entre eux soutient l'entrée ultra-rapide d'impulsion jusqu'à 50kHz ; 2 terminaux d'entrée analogique, appui 0 | entrée ou 0 de tension 10V | entrée 20mA actuelle ; Carte d'option : 4 terminaux d'entrée numérique 2 entrée de tension de l'entrée analogique terminals.support-10V-+10V |
|
| Terminal de sortie |
norme : 1 terminal de sortie numérique ; 1 terminal de sortie ultra-rapide d'impulsion (type ouvert de collecteur), appui 0 | sortie de signal d'onde 50kHz rectangulaire ; 1 terminal de sortie de relais (le deuxième relais est une option) 2 terminaux de sortie analogique, appui 0 | sortie 20mA actuelle ou 0 | sortie de tension 10V ; Carte d'option : 4 terminaux de sortie numérique |
|
| Protection | Référez-vous au chapitre 6" dépannage et contre-mesures » pour la fonction de protection | |
| Environnement | Emplacement d'installation | D'intérieur, aucun lumière du soleil directe, poussière, gaz corrosif, gaz combustible, fumée d'huile, vapeur, égouttement ou sel. |
| Altitude | 0-3000m.inverter sera sous-sollicité si l'altitude un plus haut than1000m et le courant de sortie évalué réduiront de 1% si augmentation d'altitude de 100m | |
| Température ambiante | -10°C~ +40°C, (sous-sollicité si la température ambiante est entre 40°C et 50°C) diminution évaluée maximum de courant de sortie 50°C de 1,5% si augmentation de la température par 1°C | |
| Humidité | Moins que 95%RH, sans condensation | |
| Vibration | Moins de 5,9 m/s2 (0,6 g) | |
| Température de stockage | -20°C | +60°C | |
| D'autres | Installation | Armoire fixée au mur et contrôlée par le plancher, transmurale |
| Niveau de protection | IP20 | |
| méthode de refroidissement | Refroidissement à air forcé | |
| EMC | CE ROHS |
Filtre interne d'EMC Se conforme à EN61800-3 Catégorie C3 3ème environnement |
Remplacez l'application célèbre de vfd de marques en général.
![]()
Fonction de PID
| Groupe-fonction 40 PID | ||||
| r40.00 | Valeur finale de sortie de PID | Seule unité lue : 0,1% | - | ● |
| r40.01 | Valeur réglée finale de PID | Seule unité lue : 0,1% | - | ● |
| r40.02 | Valeur finale de retour de PID | Seule unité lue : 0,1% | - | ● |
| r40.03 | Valeur de déviation de PID | Seule unité lue : 0,1% | - | ● |
| P40.04 | Source de référence de PID |
Le chiffre de l'unité : Source de référence principale de PID (ref1) 0 : Arrangement de Digtital 1 : AI1 2 : AI2 3 : AI3 (la carte d'expansion d'E/S) 4 : AI4 (la carte d'expansion d'E/S) 5 : Impulsion à haute fréquence de HDI 6 : Communication Le chiffre de Ten : Source de référence de PID Auxilary (ref2) mêmes que le chiffre de l'unité |
00 | ☆ | |||||||||||||||
| P40.05 | Gamme de retour donnée par PID | 0.01~655.35 | 100,00 | ☆ | |||||||||||||||
| P40.06 | Arrangement numérique 0 de PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
| P40.07 | Arrangement numérique 1 de PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
| P40.08 | Arrangement numérique 2 de PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
| P40.09 | Arrangement numérique 3 de PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
|
Quand la source de référence de PID est arrangement numérique, l'arrangement numérique 0~3 de PID dépend de la fonction 43 de DI terminal (préréglez le terminal de PID I) et 44 (terminal de préréglage PID 2) :
Par exemple : Quand AI1 est employé comme retour de PID, si la gamme complète correspond à la pression 16.0kg et exige du contrôle de PID d'être 8.0kg ; puis la gamme réglée de retour de P40.05 PID à 16,00, terminal numérique de référence de PID choisi à P40.06, a placé P40.06 (arrangement 0 de préréglage de PID) pour être 8,00
|
|||||||||||||||||||
|
Quand la source de référence de PID est arrangement numérique, l'arrangement numérique 0~3 de PID dépend de la fonction 43 de DI terminal (préréglez le terminal de PID I) et 44 (terminal de préréglage PID 2) :
Par exemple : Quand AI1 est employé comme retour de PID, si la gamme complète correspond à la pression 16.0kg et exige du contrôle de PID d'être 8.0kg ; puis la gamme réglée de retour de P40.05 PID à 16,00, terminal numérique de référence de PID choisi à P40.06, a placé P40.06 (arrangement 0 de préréglage de PID) pour être 8,00
|
||||||||||||||||||||
| P40.10 | Sélection de source de référence de PID | 0 : ref1 1 : ref1+ref2 2 : ref1-ref2 3 : ref1*ref2 4 : ref1/ref2 5 : Minute (ref1, ref2) 6 : Maximum (ref1, ref2) 7 (ref1+ref2)/2 8 : changement de fdb1and fdb2 |
0 | ☆ | ||||||||||||||||
| P40.11 | Retour source1 de PID |
Le chiffre 0 de l'unité : Retour source1 (fdb1) de PID 0 : AI1 1 : AI2 2 : AI3 (carte d'option) 3 : AI4 (carte d'option) 4 : PLUSE (HDI) 5 : Communication 6 : Courant de sortie évalué de moteur 7 : Fréquence de sortie évaluée de moteur 8 : Couple de sortie évaluée de moteur 9 : Fréquence de sortie évaluée de moteur Le chiffre de Ten : Retour source2 (fdb2) de PID Mêmes que le chiffre de l'unité |
00 | ☆ | ||||||||||||||||
| P40.13 | Sélection de fonction de retour de PID | 0 : fdb1 1 : fdb1+fdb2 2 : fdb1-fdb2 3 : fdb1*fdb2 4 : fdb1/fdb2 5 : La minute (fdb1, fdb2) prennent à fdb1.fdb2 une plus petite valeur 6 : Maximum (fdb1, fdb2) prenez à fdb1.fdb2 une plus grande valeur 7 : (ref1+ref2)/2 8 : changement de fdb1and fdb2 |
0 | ☆ | ||||||||||||||||
| P40.14 | Caractéristique de sortie de PID |
0 : La sortie de PID est positive : quand le signal de retour dépasse la valeur de référence de PID, la fréquence de sortie de l'inverseur diminuera pour équilibrer le PID. Par exemple, le contrôle de la tension PID pendant la conclusion 1 : La sortie de PID est négative : Quand le signal de retour est plus fort que la valeur de référence de PID, la fréquence de sortie de l'inverseur augmentera pour équilibrer le PID. Par exemple, le contrôle de la tension PID pendant le wrapdown |
0 | ☆ | ||||||||||||||||
|
La caractéristique de sortie de PID est déterminée par P40.14 et positif de la fonction PID de Di terminal 42/commutation négative : P40.14 = 0 et « 42 : Terminal de changement positif/négatif de PID » est invalide : : La caractéristique de sortie de PID est positive P40.14 = 0 et « 42 : Terminal de changement positif/négatif de PID » est valide : : La caractéristique de sortie de PID est négative P40.14 = 1 et « 42 : Terminal de changement positif/négatif de PID » est invalide : : La caractéristique de sortie de PID est négative P40.14 = 1 et « 42 : Terminal de changement positif/négatif de PID » est valide : : La caractéristique de sortie de PID est positive |
||||||||||||||||||||
| P40.15 | Limite supérieure de sortie de PID | -100.0%~100.0% | 100,0% | ☆ | ||||||||||||||||
| P40.16 | limite inférieure de sortie de PID | -100.0%~100.0% | 0,0% | ☆ | ||||||||||||||||
| P40.17 | Gain KP1 de Proportaional |
0.00~10.00 La fonction est appliquée au gain proportionnel P de l'entrée de PID. P détermine la force du régleur entier de PID. Le paramètre de 100 signifie que quand la compensation du retour de PID et de la valeur indiquée est 100%, la gamme de ajustement du PID s'ajustent est la fréquence maximale (ignorant la fonction intégrale et la fonction différentielle).
|
5,0% | ☆ | ||||||||||||||||
| P40.18 | Temps intégral TI1 |
0.01s~10.00s Ce paramètre détermine la vitesse du régleur de PID pour effectuer l'ajustement intégral sur la déviation du retour et de la référence de PID. Quand la déviation du retour et de la référence de PID est 100%, le régleur intégral fonctionne sans interruption après l'heure (ignorant l'effet proportionnel et l'effet différentiel) de réaliser la fréquence maximale (P01.06) ou la tension maximale (P12.21). Plus court le temps intégral, plus fort est ajustement
|
1.00s | ☆ | ||||||||||||||||
| P40.19 | Temps différentiel TD1 |
0.000s~10.000s Ce paramètre détermine la force du rapport de changement quand le régleur de PID effectue l'ajustement intégral sur la déviation du retour et de la référence de PID. Si le retour de PID change 100% pendant le temps, l'ajustement du régleur intégral (ignorant l'effet proportionnel et l'effet différentiel) est la fréquence maximale (P01.06) ou la tension maximale (P12.21). Plus longtemps le temps intégral, plus fort est l'ajustement.
|
0.000s | ☆ | ||||||||||||||||
| P40.20 | Gain KP2 de Proportaional | 0.00~200.0%. | 5,0% | ☆ | ||||||||||||||||
| P40.21 | Temps intégral TI2 |
0.00s (pas tout effet intégral) ~20.00s
|
1.00s | ☆ | ||||||||||||||||
| P40.22 | Temps différentiel TD2 | 0.000s~0.100s | 0.000s | ☆ | ||||||||||||||||
| P40.23 | État de changement de paramètre de PID |
0 : aucun changement Ne commutez pas, l'utilisation KP1, TI1, TD1 Commutateur par DI terminal KP1, TI1, TD1 sont employés quand la fonction de no. 41 de DI terminal est invalide ; KP2, TI2, TD2 sont employés si valides La valeur absolue de la commande de PID et de la déviation de retour est moins que P40.24, utilisant KP1, TI1, TD1 ; la valeur absolue de la déviation est plus grande que P40.25, utilisant KP2, TI2, les paramètres TD2 ; la valeur absolue de la déviation est entre P40.24~P40.25, les deux ensembles de paramètres transitioned linéairement. |
0 | ☆ | ||||||||||||||||
| P40.24 | Devation 1 de changement de paramètre de PID | 0.0%~P40-25 | 20,0% | ☆ | ||||||||||||||||
| P40.25 | Devation 2 de changement de paramètre de PID | P40-24~100.0% | 80,0% | ☆ | ||||||||||||||||
produits recommandés

